
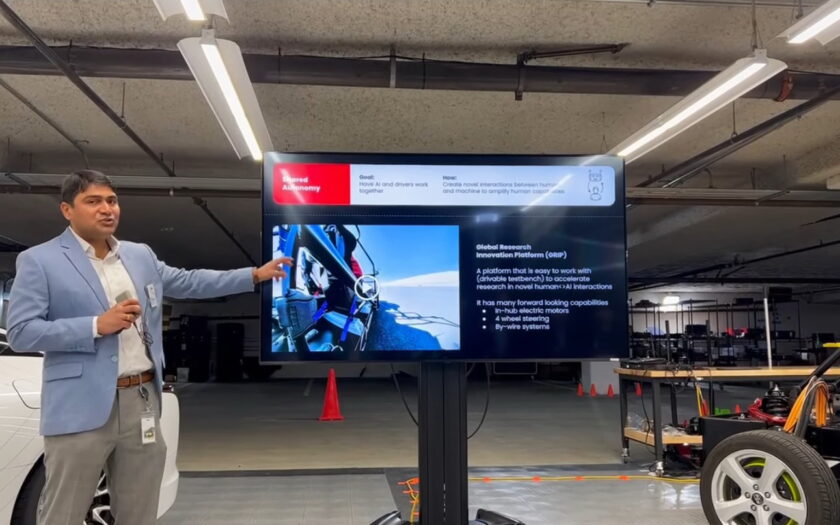
TRI(Toyota Research Institute)在2023年2月15日於日本举行的TRI Expo上展示了其名為GRIP(Global Research Innovation Platform)的轮轂马达EV原型车。
这个原型车是為实验而设计的试验品,它配备了能够同步控制的四轮转向(4WS- Four-Wheel Steering)系统。这个系统可以使前后轮以相同的方向转动,而反相控制时则可以使前后轮反向转动。

GRIP EV最大的特点是可以在电脑上自由切换前后轮的同相控制和反相控制。它可以使前后轮同方向转动,实现类似螃蟹横走的样子。另一方面,反相控制则可让车子以非常短的转弯半径进行急转弯或通过非常小的弯。甚至甩尾漂移。
GRIP EV的车体框架不是铝合金;而是採用铁製,这样之后处理就很容易。由於每个框架每个连接部分都是用螺丝固定,因此可以改变车辆的轴距。
影片展示了GRIP EV原型车的测试。其中一个是绕锥测试,透过影片大家可以清楚看到它在转向时前后轮胎的转动方向是相同的。另外也可以看到原型车在漂移时前后轮胎的转向是不相同的。
Toyota的GRIP EV原型车还在研发中,未来是否会对外发布尚不清楚。然而,它背后的技术可以用於其他车辆和应用,使开车更安全、更高效。
